ISS 복잡한 환경에서도 안정적인 우주 로봇 항법! GIST-NASA, 3D 목표 지점 정확히 찾아가는 혁신 기술 개발
광주과학기술원(GIST) 김표진 기계로봇공학과 교수팀이 미국 항공우주국(NASA)과 협력하여 우주 로봇의 항법 정확도를 획기적으로 높이는 ‘디지털 트윈 기반 시각 나침반 기술’을 개발했습니다. 이 기술은 국제우주정거장(ISS)과 같이 복잡하고 예측 불가능한 우주 환경에서도 로봇이 방향 감각을 잃지 않고 안정적으로 목표 지점을 찾아갈 수 있도록 돕습니다.
기존 우주 로봇 항법 기술의 한계
기존 우주 로봇은 주로 GPS나 관성 센서를 이용하여 위치를 파악하고 이동 경로를 설정했습니다. 하지만 우주 공간에서는 GPS 신호가 도달하지 않고, 관성 센서 역시 시간이 지남에 따라 오차가 누적되는 문제가 있었습니다. 특히 ISS와 같은 폐쇄된 공간에서는 외부 참조점이 부족하여 로봇의 위치 추정 정확도가 더욱 떨어지는 어려움이 있었습니다.
GIST-NASA의 혁신적인 ‘디지털 트윈 기반 시각 나침반 기술’
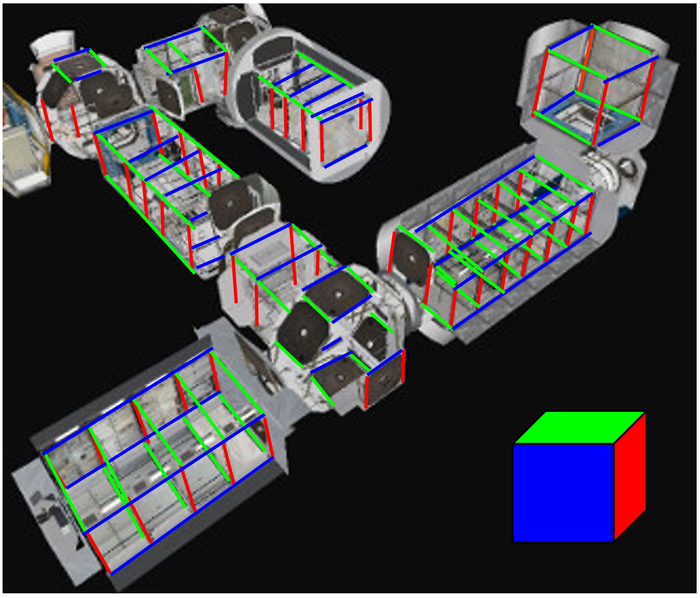
김표진 교수팀은 이러한 한계를 극복하기 위해 ‘디지털 트윈’ 기술을 활용한 새로운 항법 시스템을 개발했습니다. 디지털 트윈은 현실 세계의 객체나 시스템을 가상 세계에 똑같이 구현한 것으로, 로봇은 가상 환경에서 미리 학습하고 시뮬레이션을 수행하여 실제 환경에서의 오류를 최소화할 수 있습니다.
이 기술은 로봇이 카메라를 통해 주변 환경을 인식하고, 디지털 트윈 데이터와 비교하여 자신의 위치와 방향을 정확하게 파악합니다. 또한, 로봇은 3D 목표 지점을 정확하게 찾아갈 수 있도록 시각적인 정보를 활용하여 경로를 계획하고 제어합니다. 이러한 시각 나침반 기술은 기존 GPS나 관성 센서에 의존하는 방식보다 훨씬 정확하고 안정적인 항법 성능을 제공합니다.
ISS 환경에서의 활용 가능성과 미래 전망
개발된 기술은 ISS와 같은 복잡한 우주 환경뿐만 아니라, 달이나 화성과 같은 다른 행성 탐사에도 활용될 수 있을 것으로 기대됩니다. 특히, 우주 로봇이 자율적으로 탐사 임무를 수행하고, 인간 우주 비행사를 지원하는 데 중요한 역할을 할 것으로 예상됩니다. 김표진 교수는 “이번 기술 개발을 통해 우주 로봇의 활용 범위를 넓히고, 미래 우주 탐사 시대에 기여할 수 있도록 노력하겠다”고 밝혔습니다.
GIST는 앞으로도 NASA와의 공동 연구를 통해 우주 로봇 기술을 더욱 발전시켜 나갈 계획입니다. 이 기술은 우주 탐사 분야에 새로운 가능성을 열어줄 것으로 기대되며, 한국의 우주 기술 경쟁력 강화에도 크게 기여할 것으로 전망됩니다.





